Mini Drone Race!
Table of Contents:
- 1. Deadline
- 2. Problem Statement
- 3. Environment and VizFlyt simulator
- 4. Perception Stack
- 5. Navigation Stack
- 6. Testing (Live Demo)
- 7. Submission Guidelines
- 8. Allowed and Disallowed functions
- 9. Tips, Tricks And Hints
- 10. Collaboration Policy
1. Deadline
Due on 11:59:59 PM, Nov 04, 2025.
2. Problem Statement
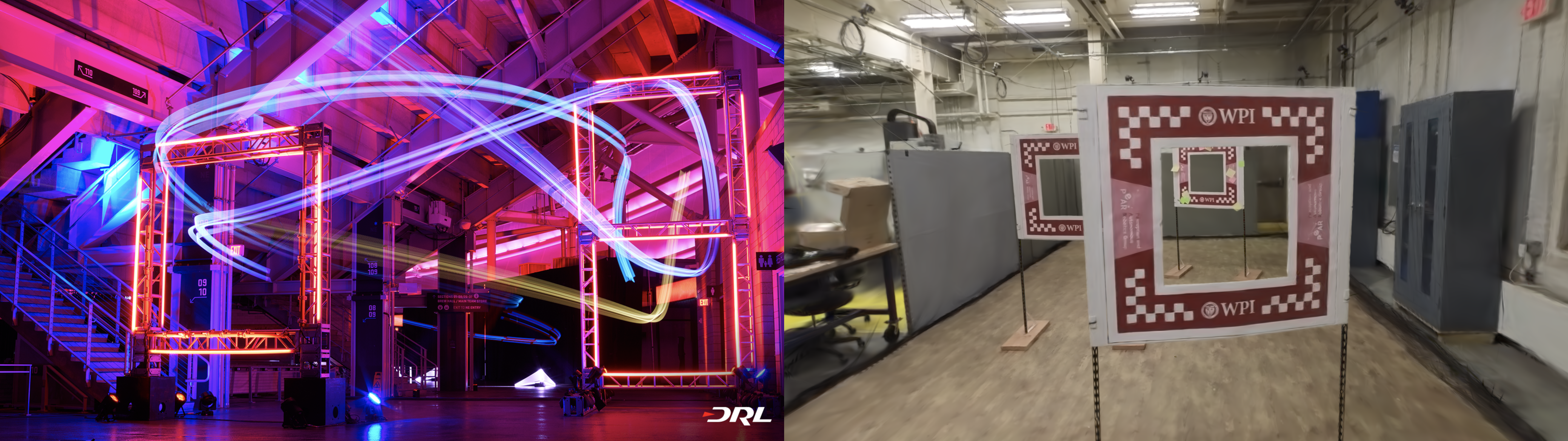
Drone racing is a fast growing sport that is a great combination of technology and skill. In this sport, professional pilots fly small quadrotors through complex tracks at high speeds (see Fig. 1). Developing a fully autonomous racing drone is difficult due to challenges that span dynamics modeling, onboard perception, localization and mapping, trajectory generation, and optimal control. Recently, Lockheed Martin hosted a competition called AlphaPilot with a whopping 1M USD grand prize.
In this project, you’ll build an autonomy stack to navigate through multiple windows inspired by the AlphaPilot competition. The project has two parts: the first part being the perception stack and the second part being the planning, control and integration stack, all deployed on the VizFlyt simulator. Download the starter package from here.
3. Environment and VizFlyt simulator
The track is made of multiple windows out of which the closest window will be seen from the starting point (Origin). Your robot is a photorealistic dynamics simulation built in VizFlyt and is equipped with a front-facing RGB-D sensor (You are not allowed to change the sensor characteristics like FOV or sensor size).
Firstly, the goal would be to detect/segment the closest window using a deep learning approach (See for example Fig. 1 right). More details on the algorithmic parts of the perception stack are explained in the next section.
4. Perception Stack
There are three distinct parts in the perception stack.
4.1. Window Detector
In the first step, implement a deep network to detect/segment the corners of the window or detect/segment the entire window. Here you have a flexibility in the design choice. You can use any network architecture of your choice. Practically, your network has to run fast enough on the NVIDIA Orin Nano, so be cognizant of your parameters and architecture. For your reference, aim for atleast 5Hz inference speed on PC CPU.
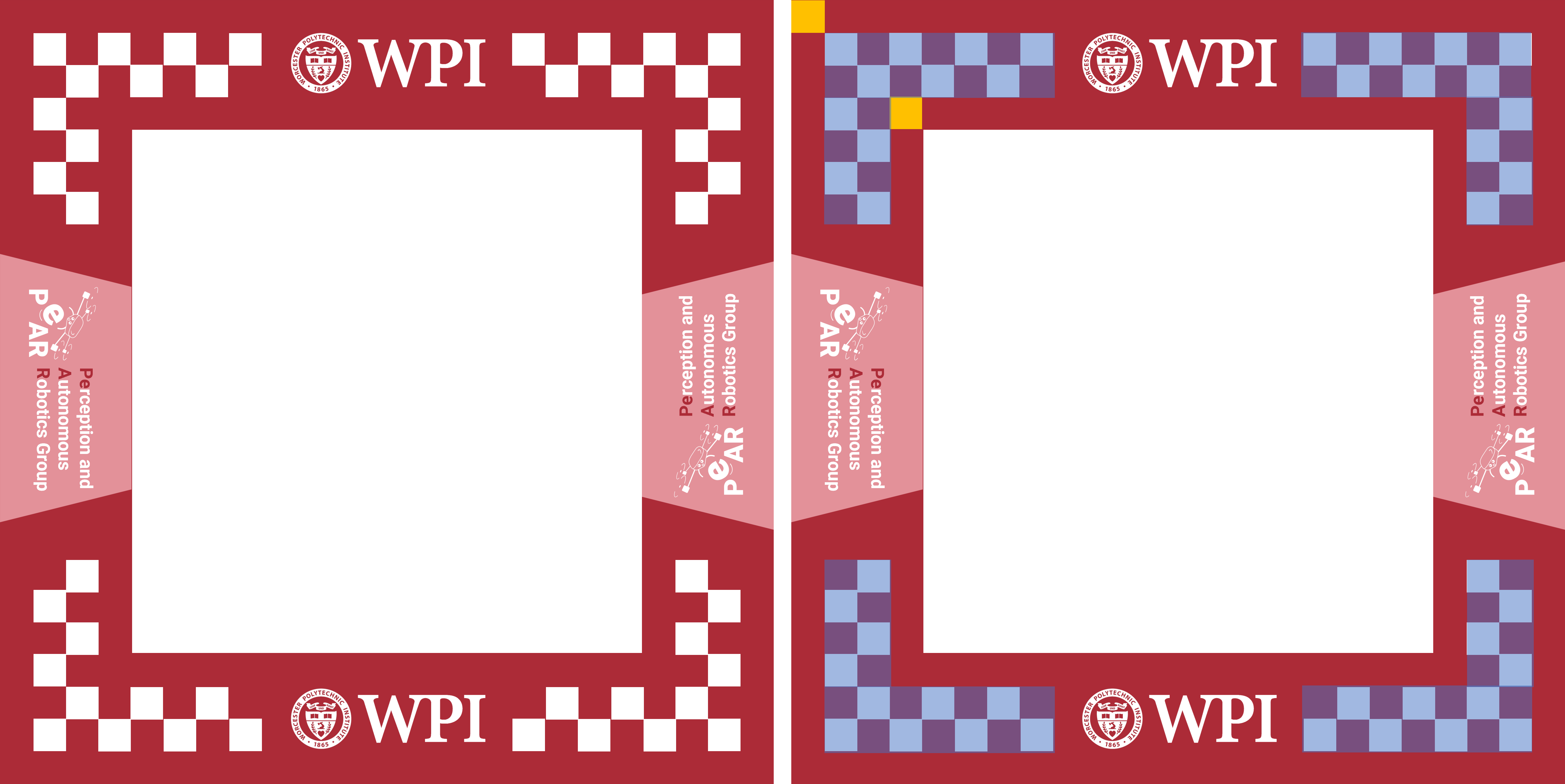
Your goal would be to build a lightweight neural network that has good accuracy that can be used in the next steps. To accomplish this, you will have to generate windows in simulation (Blender and NOT VizFlyt) from different views and backgrounds and scenarios and train your network (See Fig. 2). You are not allowed to use VizFlyt or any other reconstruction method to get any images for training. Be sure to maintain the aspect ratio of the window accurately when generating data for good generalization to the real world (the real windows are printed with no scaling). We will describe the specifications of the window next. The window is almost a square with checkerboard pattern on the edges. Each checkerboard pattern is (highlighted in blue in Fig. 3) of a grid of size \(7 \times 6\) (for X or horizontal and Y or vertical) directions. The distance from checkerboard pattern to either edge is the same dimension as one checkerboard square (yellow highlight in Fig. 3). The WPI logo will always be centered vertically and the PeAR logo will be centered horizontally (however, these can be absent too or be changed to other logos). The window will be the same WPI crimson color (rgb(172, 43, 55)) but can appear different in different lighting. Your data can randomize the viewpoint (or window pose), window lighting, window design with respect to logos, noise, the background among others. The thickness of the window is negligible compared to the height and width of the window. There can be multiple windows in the frame. Also, each window is X-Y symmetric. A high resolution PNG image and the associated PPTX file used to generate the windows are given in the starter package in the textures folder which you have downloaded before.

4.2. Detection Filtering
Once you have obtained detections/segmentations (bounding box or per-pixel segmentation) from the previous step, you might notice that there are multiple windows in the frame, you will need to filter and extract the closest window to fly to. You can use the depth image from your RGBD sensor and find the closest points for filtering.
4.3. Sim2Real
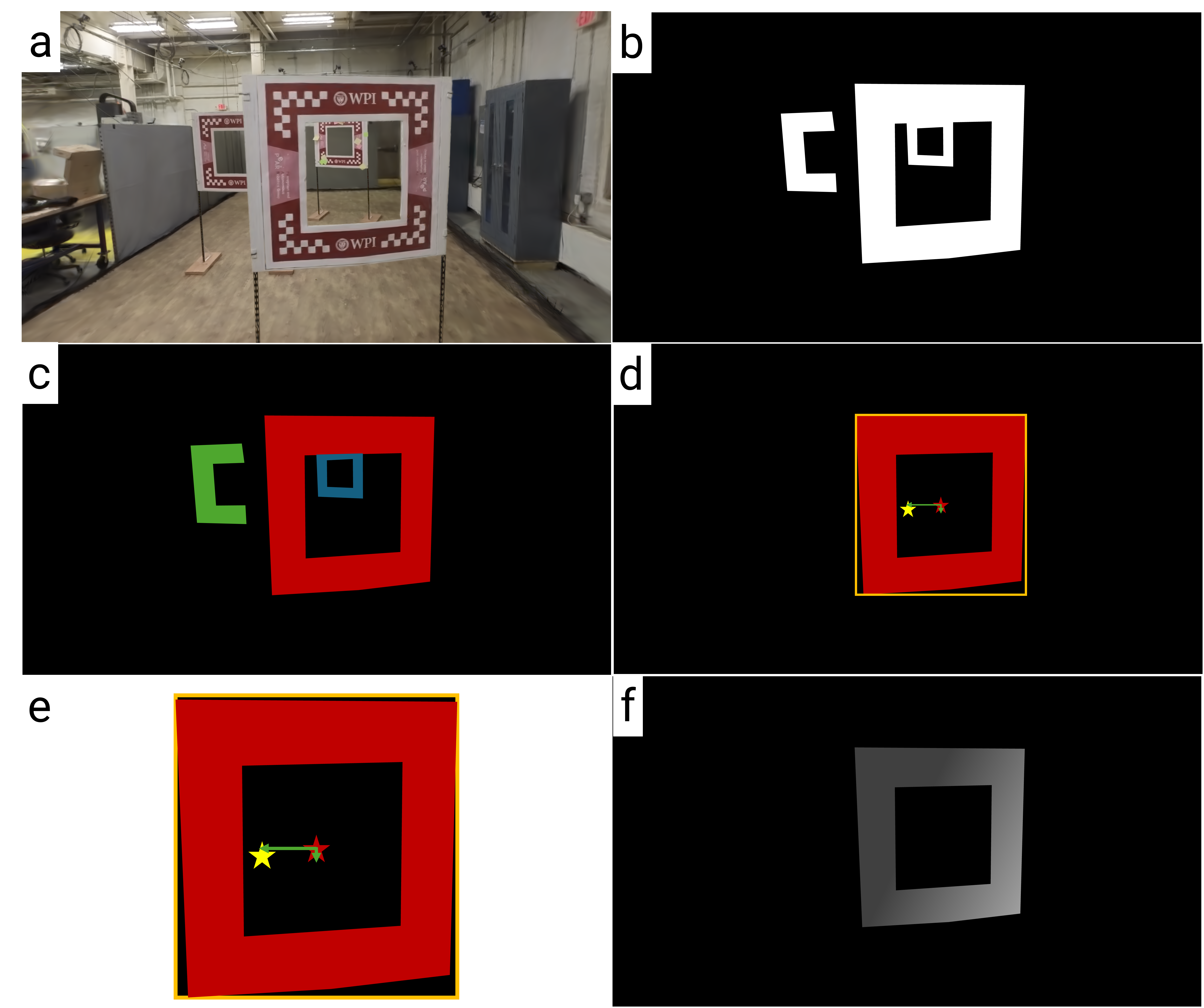
You have trained your neural network in simulation (Blender and some more pizzazz) with domain randomization in the hopes of a good sim2real transfer. To test this, you will collect data from VizFlyt (See Fig. 4 for some sample images). Then run inference on your collected data and inspect to see how well your perception stack works. If it does not work well (as well as you think, it will NOT be perfect, do not worry), go back and change your data generation or use other methods to perform a better sim2real transfer like we talked about in class. You can use GenerativeAI tools to make the images look photorealistic. Let your creativity run wild in each of the parts here (Only exception is that you are not allowed to use 3D reconstruction and VizFlyt for this part).
5. Navigation Stack
You are free to design any method to plan your path from the current position to the closet window. This is relatively simple as you have a depth image to gauge the distance to objects in the scene and there are no other obstacles in the scene. Also, from the starting location, you will be able to see atleast a part of the first window. Then you can center the quadrotor towards the respective window and fly though it. In this ideology, you are generating position waypoints for your controller to follow. Alternatively, you can also perform visual servoing to center yourself towards the window and fly through it (although this might be more robust this will most likely be slower). A simple concept of visual servoing like controller is shown in Fig. 4.
6. Testing (Live Demo)
On the day of the deadline, each team will be given a 10 minute slot for demoing their code in action to the instructors. The instructors will give a new splat file with starting co-ordinates as they wish (See Example in Fig. 5). The new splat can be varied in window poses, lighting, color, occlusions, background and so on. You are required to show us the detections/segmentations at every frame and navigation through each of the windows (visualization does not have to be real-time, you can save images and run inference, but inference has to be shown real-time and within the 10 minute time slot given to you).

7. Submission Guidelines
If your submission does not comply with the following guidelines, you’ll be given ZERO credit.
7.1. File tree and naming
Your submission on ELMS/Canvas must be a zip file, following the naming convention YourDirectoryID_p3.zip. If you email ID is abc@wpi.edu, then your DirectoryID is abc.For our example, the submission file should be named abc_p3.zip. The file must have the following directory structure. The file to run for your project should be called YourDirectoryID_p3/Code/main.py. You can have any helper functions in sub-folders as you wish, be sure to index them using relative paths and if you have command line arguments for your Wrapper codes, make sure to have default values too. Please provide detailed instructions on how to run your code in README.md file.
NOTE: Please DO NOT include data in your submission. Furthermore, the size of your submission file should NOT exceed more than 500MB.
The file tree of your submission SHOULD resemble this:
YourDirectoryID_p3.zip
├── Code
│ ├── main.py # Main entry point -- implement segmentation and navigation logic.
│ ├── splat_render.py # Gaussian splat renderer: generates RGB + depth from pose
│ ├── control.py # PID controller and QuadrotorController class
│ ├── quad_dynamics.py # Quadrotor dynamics simulation
│ ├── tello.py # DJI Tello drone parameters
│ └── trajectory_generator.py # B-spline trajectory generation
├── data
│ ├── washburn-env6-itr0-1fps/ # Splat rendering checkpoint
│ └── washburn-env6-itr0-1fps_nf_format/ # COLMAP image dataset
├── render_settings
│ └── render_settings_2.json # Render configuration (resolution, FOV, camera matrix)
├── log/ # Controller logs (auto-created)
├── Report.pdf
├── Video.mp4
└── README.md
7.2. Report
For each section of the project, explain briefly what you did, and describe any interesting problems you encountered and/or solutions you implemented. You must include the following details in your writeup:
- Your report MUST be typeset in LaTeX in the IEEE Tran format provided to you in the
Draftfolder and should of a conference quality paper. Feel free to use any online tool to edit such as Overleaf or install LaTeX on your local machine.
7.3. Video
Record the FPV (robot camera view from VizFlyt, RGBD) video in .mp4 format and submit it in the zip file. Make sure to name it as Video.mp4. This video should include the raw footage (RGBD), the detections (output of the network) all stacked side by side. Use the maximum resolution possible here for the best quality.
8. Allowed and Disallowed functions
Allowed:
- Any functions regarding reading, writing and displaying/plotting images in
cv2,matplotlib - Basic math utilities including convolution operations in
numpyandmath - Any functions for pretty plots
- Quaternion libraries
- Any library that perform transformation between various representations of attitude
- Any code for alignment of timestamps
- Any code for data handling, network setup and architecture engineering
- Any code for estimation of 3D poses from 2D images
- Any code for data augmentation and similar functionality
- GenAI tools for sim2real
Disallowed:
- Other student’s code in class
- VizFlyt for data generation
- Digital Twin Generation methods such as 3D reconstruction for data generation
If you have any doubts regarding allowed and disallowed functions, please drop a public post on Piazza.
9. Tips, Tricks And Hints
A simple Blender tutorial can be found here.
Generating data using Blender can be fun, exciting and equally frustrating at the same time. We are adding some hints, tricks and tips to ease this process. We will do this as a series of question and answers:
1. How do I obtain a segmentation mask of the object in the scene? Can I do this for multiple objects together?
To obtain the segmentation mask, you will use something called the Pass Index in Blender. For each object, go to Object Properties > Relations > Pass Index and set this to a unique number. Now, in your compositing tab, you can use the ID Mask node and look for this Index and write that into a file using the File Output node. You can do this for as many objects as you want as long as they all have a unique Pass Index. This can give you the closest window mask even if you have multiple windows in the scene. Note that this will only work if you have enabled Object Index in View Layer Properties > Passes > Data > Indexes tab.
2. How do I obtain the locations of the corners if I want to train my network to predict corners?
One way is to mark the corners in 3D on the window you crafted. Now, to obtain the image locations on the image, you will use the projection equation to know where each corner lies. This is going to be the most accurate way to obtain corners and you can easily do this for as many points as you want. If you want an easier but less accurate method, here it is: you can create transparent objects (such as a circle or square or anything your heart desires and setting the Material to Principles BSDF shader and Alpha parameter to 0) at the corner locations and have a rigid relation with the window (if you changing window pose). Now assign a unique Pass Index to each of these transparent objects and obtain the mask. However, transparent objects are not rendered in the Pass Index by default. To enable this, you will need to enable Object Properties > Visibility > Holdout for the particular transparent object.
3. What are we trying to predict? Can you talk about the input and output of the network?
The overall goal of the project is to obtain 3D pose of the window from 2D image(s). You are free to use one or more neural networks for any part of the perception stack. You input could be one or more images (temporally) and the output could be either a segmentation mask of the window or some corner points or the 3D pose. These are all design choices you are free to make. Your architecture will vary based on the choice of input and output. Generally, breaking down the problem into sub-problems makes it easier for the network to be trained and generalized from sim2real better.
4. Is it advisable to predict segmentations or the corners for the windows?
Both have pros and cons. Predictions of segmentations might generalize better and you get more data to work with, but this means that you need a better post-processing step. Corner predictions might be harder to train but are easier to interpret at the end. You might want to think about predicting corners more carefully, predicting directly the pixel co-ordinates is generally not advisable due to large numbers, you might want to normalize this with respect to the center of the image (here, image varies from -1 to 1 in each X and Y directions, with (0,0) being in the center). Also, be cognizant of the loss function you are using in both cases. Furthermore, think carefully about how you’ll find the closest window if there are multiple windows in the frame. Also think about how you will find the window if one of the corners or parts of the window are occluded or not detected.
5. How many images do I need to train on?
This depends heavily on the number of parameters in your network. The larger your network, the more data you will need. For example, a 10MB ResNet inspired model needs a minimum of 10K to 100K images with large variations for a good generalized performance. The rule of thumb is that if you increase model size by a factor of \(N\), then you need to increase data amount by \(N^2\). A trick used for better generalization is to train the network in simulation and then fine-tune on real data (this can be as little as 1/10th the amount of simulation data).
6. The data generation is super slow. What can I do?
You can lose photorealism and train in material preview mode. This will not generalize as well but you can train your network first on material preview mode images and then fine-tune on more photo-realistic images. This is generally called curriculum learning.
You can also download an example Blender file to play with the above things from here.
10. Collaboration Policy
NOTE: You are STRONGLY encouraged to discuss the ideas with your peers. Treat the class as a big group/family and enjoy the learning experience.
However, the code should be your own, and should be the result of you exercising your own understanding of it. If you reference anyone else’s code in writing your project, you must properly cite it in your code (in comments) and your writeup. For the full honor code refer to the RBE595-F02-ST Fall 2025 website.